

引言
采煤机的采高监测系统,大多数是基于安装在 摇臂上的倾角传感器或者是安装在摇臂销轴处的编码器来实现的,实际测量值为摇臂相对机身转过的角度。受制于采煤机实际工况,角度的微小误差会引起很大采高误差,其所得到的数值精确度难以满足采煤机智能化控制的要求。通过使用磁致伸缩位移传感器所监测的数据,能够在很大程度上减小误差,为智能化控制提供更可靠的数据依据。
1 位移传感器原理
磁致伸缩位移传感器安装于调高油缸内部,通过监测调高油缸的伸长量,换算后得到采煤机采高,其原理如下图所示。
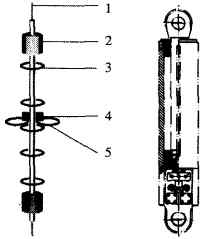
1.波导丝2.外管3.磁环磁场4.磁环5.波导丝扭矩脉冲磁场
磁环与波导管会产生一个纵向的磁场。当电流脉冲(即询问信号)由传感器电子端输出并通过波导管时,第2个磁场便由波导管的径向方面产生。2个磁场在波导管相交的瞬间,产生一个应变脉冲,这个被称为返回信号的脉冲从产生点(即位置测量点)返回传感器电子端并被检测器检出来,高速计时器对询问信号发出到返回信号到达的时间周期进行测定,可快速、精确地计算出磁环的准确位置。
利用计算脉冲的运行时间来测量的磁环位置是一个绝对值的位置读数,不需要考虑定期重标或断电后归零问题。该非接触式的测量避免了机械磨损的问题,保证了最佳的重复性和稳定性。
2 数学方法
采煤机摇臂如下图所示。
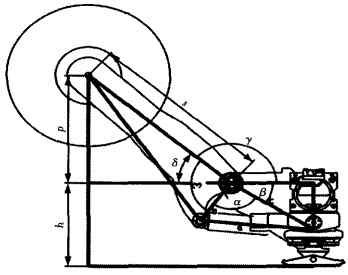
a.油缸长度 S.摇臂长度 h.机身高度
固定值,通过测量可得,经计算可得:
油缸长度所对夹角
∠α=arcos[(b²+c²-a²)/2bc]
摇臂相对相身水平方向的夹角
∠δ=∠α+∠β+∠ε-180°
摇臂行星头中心相对机身高度
P=S*sin(δ)
采煤机摇臂采高
H=h+p+r
式中 a——油缸长度,固有长度和伸长量之和,随调高油缸的伸长/缩短变化;
b——固定长度1,摇臂大回转中心到摇臂调高油缸固定点的距离,为固定值;
c——固定长度2,摇臂大回转中心到牵引部调高油缸固定点的距离,为固定值;
S——摇臂长度,摇臂行星机构中心到回转中心的距离,为固定值;
h——机身高度,平滑靴底部到回转中心的距离,为固定值;
∠β——固有角度1.固定长度2与机身水平方向的夹角,为固定值;
∠ε——固有角度2.固定长度1相对与摇臂的夹角,为固定值;
r——滚筒半径,为固定值。
即采煤机采煤高
H=h+sin{arccos[(b²+c²-a²)/2bc]+ ∠β+ ∠8-180°} · S+r
3 控制系统
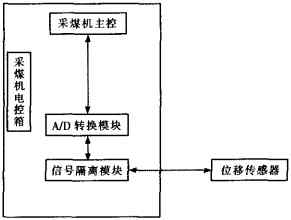
磁致伸缩传感器测量范围:0~1000m,传感器将脉冲信号转化为标准的额输出4~20 mA 的模拟量信号,控制器内对应的模拟量与数字量转换(A/D) 模块值为:0~8000.油缸实际伸长量为:实测数字量/8000× 1000.油缸实际伸长量=实际数字量/8;控制器通过监测到的数字值的变化,根据上述模型可以实时计算出传感器的量程的变化,从而换算出摇臂实际升高或降低的高度。由于井下实际工作环境恶略,干扰源也比较多,系统中添加了信号隔离,能够有效的降低干扰以及保护采煤机电控箱内部电路(见下图)。
4 主要优点
磁致伸缩位移传感器实际测量值为位移传感器的伸长量,误差放大倍数小,对于最后结果影响变小;传感器防护性能好,位移传感器安装于调高油缸内部,抗振动能力比较强,能够适应井下的复杂恶劣环境;传感器信号前端添加隔离,有效地防止了传感器损坏时进一步损坏采煤机内部电路,以及降低对传感器的干扰影响。
5 结语
针对采煤机井下的特殊环境,传感器的自身可靠性至关重要。磁致伸缩位移传感器的应用,有效地减小了采高误差,且适应环境能力比较强。不但能够提高采煤机智能化控制系统的稳定性,而且为采煤智能化控制提供可靠的数据来源。
 微信扫一扫
微信扫一扫
