

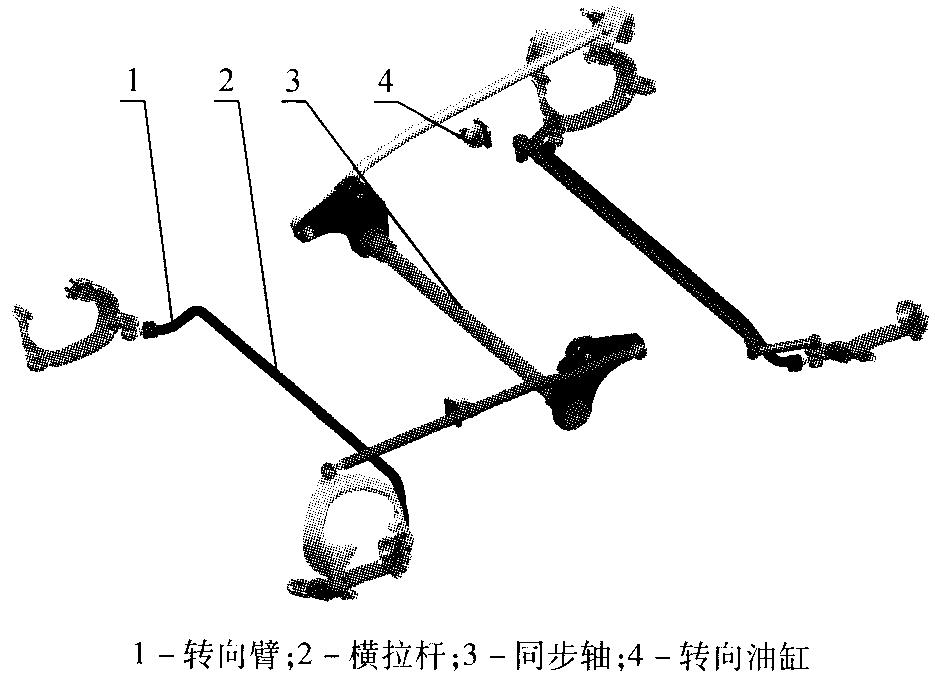
梭车采用液压动力转向装置,转向传动机构如图1所示。它由转向操纵机构、转向油缸及转向传动机构三部分组成。转向臂紧固连接轮边减速器壳体,通过横拉杆连接左右转向臂,形成转向梯形结构。转向油缸同时供液,两侧伸缩方向相反,推动纵拉杆运动,带动转向臂驱动轮边减速器转向轴旋转,实现梭车的行驶转向。
两侧转向油缸内装博尔森磁致伸缩位移位移传感器,实现左、右侧油缸伸缩的同步闭环控制,有效地避免了由于伸缩不同步造成的转向系统干涉问题,转向油缸驱动闭环控制系统如图2所示。
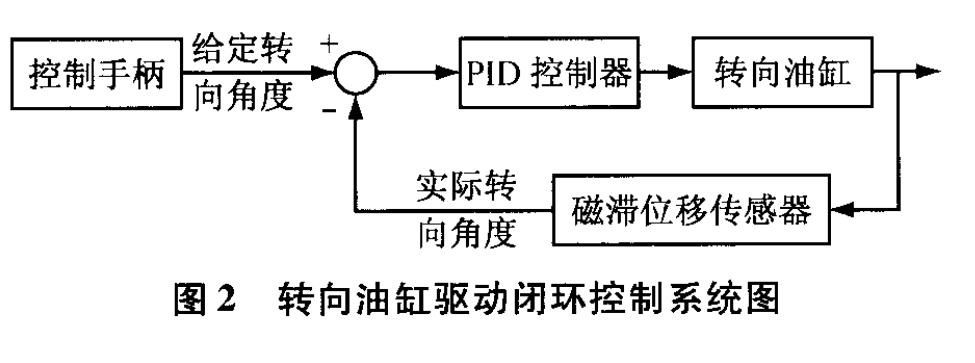
控制手柄为人工操作系统,通过手柄给定转向角度与磁滞位移传感器实际转向角度做差,得出角度控制偏差量,偏差量经过PID控制器,给出对转向油缸的控制信号,磁致伸缩位移传感器再采集实际转向角度,形成闭环控制系统,有效地提高了转向角度控制的精确性。

采用梯形机构设计,实现梭车的转向控制,转向系统中引入博尔森磁致伸缩位移传感器,反馈信号实时与控制信号做差得出偏差量,偏差量经过PID调节后再进行转向控制,形成闭环系统,提升了转向半径控制的精确性。
 微信扫一扫
微信扫一扫
