

某模锻水压机的上模安装在可上下移动的动梁上,加载缸通过动梁对上模加压时,由于加载力与模锻件的变形抗力不在同一条直线上而产生一个使动梁倾斜的倾覆力矩,使动梁发生倾斜。为保证模锻件的精度,需对动梁进行水平控制,通过测量动梁各对角之间的位移差,并根据所测得的各对角间的位移差分别对相应对角位移进行控制,使相互交叉的对角线保持水平,从而使其所在平面(动梁)保持水平。动梁的整个行程为1830mm, 每 一 对角允许的动态最大位移差为8mm。设备原有系统采用齿轮齿条将动梁的直线位移转换为角位移,然后通过自整角机间接测量的方法,只能检测每对角的位移差而不能检测动梁的位移。由于齿轮间隙等非线性因素等,其已不能满足现代高精度设备的要求,难于获得高精度的模锻产品,因此研制一种高精度长行程直线位移的检测系统,对于提高水压机平衡校正系统的控制精度和大型模毁产品的质量具有重要的现实意义:本文介绍博尔森公司研制的磁致伸缩线性位移传感器,它们具有线性度好(±0.01%)、分辨率高(最高可达 2μm)、工作可靠、结构紧凑、易于安装等优点。
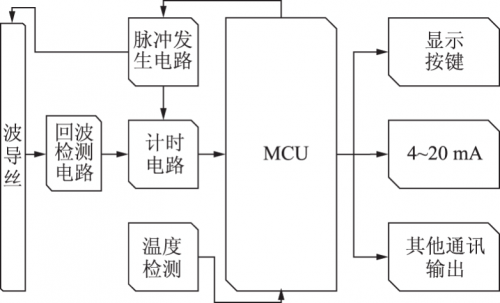
如下图所示,长行程磁致伸缩位移传感器主要由三部分组成:电子装置、测量杆和位置磁铁。测量杆为非磁性材料的不锈钢管,在钢管套内封装一 根由特种镍铁合金制成的能产生磁致伸缩的波导管。位置磁铁是一个永久磁铁,一般安装在被测对象动梁上并随之运动。电子装置封装在一个结实耐用的铝制机壳内,它是信号处理的核心部件。

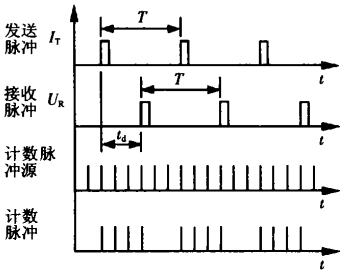
长行程磁致伸缩位移传感器的工作原理并不复杂,是利用两个不同磁场相交,在波导管内产生一个应变脉冲信号,然后计算这个信号被探测所需的时间,从而计算出位置磁铁的准确位置。磁致伸缩位移传感器的两个磁场一个来自波导管外面的位置磁铁,另一个源自传感器内由电子部件产生并经波导管传播的电流脉冲IT,当两个磁场相交时会由于波导管的磁致伸缩作用而产生一个应变脉冲,其以机械波的形式以固定速度返回电子部件的感测线圈,经放大整形后形成另一脉冲列UR。在电流脉冲I频率适当的情况下,沿波导管方向传播的应变脉冲UR的频率与电子部件发送的电流脉冲频率T1相同,但UR 较IT有一段延迟时间td。它和位置磁铁到检测器之间的距离成正比,因此只要测得电子部件向波导管发送脉冲电流IT的一 刻到感测线圈测得的返回应变脉冲所需的时间,即UR滞后于IT的时间,便能准确地计算出位置磁铁与感测线圈之间的距离。
如上午所示,发送的电流脉冲列IT由石英振荡器和分频器产生,并经驱动器转换为电流脉冲列IT输入到波导管内的铜导线,同时也加到R-S触发器的置位端S,使其输出端Q为高电平,波导管产生的应变脉冲列UR经时间延迟td后到达检测器,在经过脉冲放大器F₁和电平比较器F₂进行滤波、限幅、整形处理,输出到触发器的复位端 R、使输出端Q为低电平,形成调宽的输出脉冲列Up,其脉宽(高电平)正是UR滞后于IT和td。长行程磁致伸缩位移传感器采用脉冲计数方法测量信号Up的脉宽,由如下图所示的计器脉冲源信号对Up进行调制,形成计数器计数脉冲、对每周期T1内计数器计数脉冲的数量进行处理便可转换为与位置磁铁位置对应的数字量。因为Up的脉宽td正比于位置磁铁与感测线圈的距离,所以计数脉冲的频率愈高,时间td内的计数脉冲数越多,一个计数脉冲表示的当量距离越小,即分辨率越高。如应变脉冲在波导管内的传播速率为 v=2830m/s,计数脉冲频率为141.5MHz,分辨率则为:
△= 830*106/141. 5*106 =20um
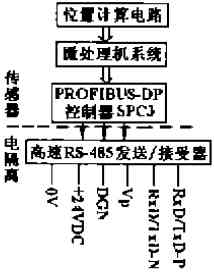
采用上述方法将位置磁铁的位置精确计算出来后,数据由微处理机系统传送给 PROFIBUS-DP控制器SPC3.最后由 PROFIBUS-DP控制器SPC3 通过高速 RS-485 发送/接受器与可编程序控制器进行通迅,将位置信息输送给 PLC 或 从 PLC接受控制指令、如下图所示。
3 水压机平衡校正系统位置检测系统
如图6所示,该系统包括 长行程磁致伸缩位移传感器、通讯处理器 CP342-5、中央处理单元 CPU315、PROFIBUS总线、网络终端接头、电源。动梁的四角分别安装一个线性位移传感器、直接测量动梁四角的位置,分别利用对角两传感器检测到的位置之差作为相应对角线水平误差,并利用此误差对相应对角线进行控制。同时将动梁四角位置的平均值经相应处理作为上下模具的间距,并且通过显示器进行显示,作为对水压机主机系统操作的依 据 。磁致伸缩传感器的电源为+24VDC, 其与 CP342-5之间的通讯采用PROFIBUS现场总线,如下图所示。

CP342-5是连接SIMATIC S7-300可编程序控制器和PROFIBUS-DP总线系统的成本优化模块,它接受CPU的通讯任务负载,通过总线连接器与相邻模块相连,本系统利用它将磁致伸缩传感器的位置信号通过PROFIBUS 现场总线送到 CPU315,然后进行数据分析与处理。
整个检测系统的硬件连接有两种方式: 一种是磁致伸缩传感器与CP342-5之间采用4芯屏蔽电缆连接,其中2芯为网络总线,另2芯为传感器电源线;另一种是CP342-5与CPU315之间采用总线连接器。硬件连接完毕后,还须利用 STEP7软件对上述硬件进行配置,包括CP342-5和长行程磁致伸缩位移传感器的地址分配、通讯波特率等进行设定。然后利用STEP7进行编程,以实现CP342-5与CPU315之间的数据交换、STEP7有两个模块用于实现 CP342-5和 PROFIBUS现场总线上各网点之间进行通讯,即与磁致伸缩位移传感器之间进行通讯,如下图所示
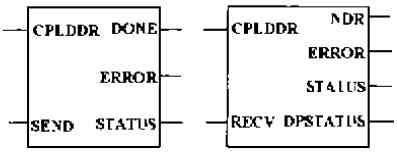
图(a)的功能是CPU315通过CP342-5向PROFIBUS总线发送数据 ; 图(b)的功能是CPU315通过CP342-5从PROFIBUS总线接收数据。图中各参数的意义说明如下:
CPLADDR—CP342-5 的起始地址。
SEND— 要发送数据的起始地址和长度。
DONE— 反映数据是否正确无误地发送
ERROR— 错误码。
STATUS— 反映通讯过程状态的状态字。
RECV— 接受数据存放的起始地址和长度。
NDR一反映 CP342-5 是否在接受新数据。
DPSTATUS—DP 一状态码。
4 结论
长行程磁致伸缩位移传感器具有线性度好、分辨率高、与PLC 接口简单、结构紧凑、安装方便等优点,它和可编程序控制器组成某大型模锻水压 机平衡校正系统水平位置的测控系统,实现了高精度的动梁水平控制和位置监视,调试简便,工作可靠。
 微信扫一扫
微信扫一扫
