

磁致伸缩位移传感器原理及装置设计
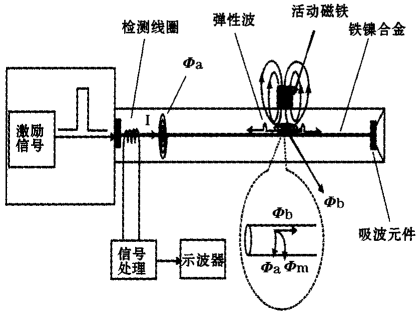
磁致伸缩位移传感器基本工作原理如下图所示。工作时,激励模块产生足够强度的脉冲电流信号I加载到铁镍合金上,电流I沿着波.导丝传播时产生环绕波导丝的周向磁场φ。,当该磁场传播到活动永磁铁处时将与活动永磁产生的轴向磁场中叠加,形成一个螺旋形的合成磁场。根据威德曼效应,铁镍合金材料同时受到轴向和周向磁场的影响,这两种磁场共同作用从而使铁镍材料的磁畴排列发生改变,由此产生的磁致伸缩就形成了铁镍合金材料宏观上的扭转从而在磁场叠加处产生弹性波并以超声波形式向波导丝两端传播。检测线圈将传播到线圈处的弹性波转换成电势能,经过检测线圈信号处理电路实现对激励脉冲信号与弹性波之间时间差值的测量,并在示波器上显示。
位移测量原理
时间差示意图如图2所示。磁致伸缩传感器位移的检测是通过计算弹性波从磁铁到检测线圈的传播时间At来实现的,设弹性波传播速度为D,则永久磁铁到线圈的距离为:
L=V*△t=√G/p*△t
式中:L为活动永磁铁到检测线圈的距离;V为弹性波在铁镍合金上的传播速度;G为材料的弹性模量;p为材料的密度;△t为激励脉冲与返回脉冲的时间差。
材料的弹性模量和密度是一定的,因此位移量只与时间差△t成正比关系。
 微信扫一扫
微信扫一扫
