

磁致伸缩位移传感器属于非接触式线性位置传感器,它利用两个磁场的瞬时相互作用来产生沿波导传播的应变脉冲。其中一个磁场来自沿波导外部移动的磁体,另一个磁场则来自波导本身。具备绝对测量功能的磁致伸缩位置传感器,会为行进轴上的每个点生成独特信号。这类传感器的优势在于采用非接触式设计,不存在磨损或摩擦问题,同时也不受振动影响,因此对工作循环次数没有限制。其缺点是传感器两侧存在死区,且无法将死区缩小至零。
磁致伸缩是铁磁材料的一种特性,即当铁磁材料处于磁场中时会发生膨胀或收缩。该传感器通过感应永磁体(位置磁体)的位置,来确定永磁体与传感器头部之间的距离。
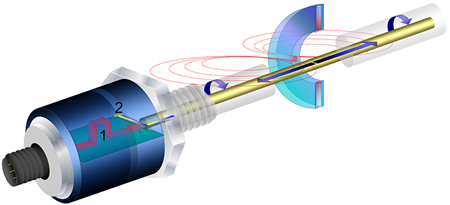
磁致伸缩传感器主要由五个部分组成:波导、位置磁体、电子器件、应变脉冲检测系统和阻尼模块。
通常情况下,波导线被封装在保护套内,并与被测量设备相连。当施加电流脉冲时,会产生沿波导传播的声波,该声波会传到一小块磁致伸缩材料上。这块材料穿过线圈,并被一个小型永磁体磁化。声波引发的应力会使磁致伸缩材料的磁导率发生波动,进而导致其磁通量发生变化,最终使线圈产生电压输出。电子电路会检测到该电压脉冲,并将其调理成所需的输出信号。
在传感器杆的末端,也就是与头部相对的一端,存在一个不可用区域,被称为死区。在设计系统时,必须确保位置磁体的前端与杆端的距离不小于规定的死区距离。
特性
- 编码器读数:根据传感器的特性,测量方式可分为绝对式和增量式。磁致伸缩位置传感器通常为绝对式。
- 绝对式:绝对读数意味着在通电时无需设置零位即可准确知晓位置。若发生断电情况,恢复供电后可立即确定位置。
- 增量式:增量测量不会产生唯一的位置信号。断电后需重新归零,并且依赖外部开关或传感器来获取初始参考。
- 输出
- 绝对码:通常在电源循环后读取位置,有多种输出类型。
- 格雷码输出需要使用单位距离编码器,在从一个测量步长过渡到下一个测量步长时,只有一位发生变化。
- 二进制输出以一系列的1和0来表示。
- 二进制编码的十进制(BCD)输出用十进制数(整数)表示,每个数字由四位表示。
- 增量信号:增量信号可以是数字输出或模拟输出。
- 数字式:数字方波输出线产生一个或两个方波,通过正交法可使每根线获得四个计数。
- 模拟式:模拟正弦输出使用两个相位差90°的通道来读取和组合正弦与余弦信号。理论上其分辨率是无限的,仅受外部数字化设备分辨率的限制。
- 单通道磁致伸缩位置传感器每物理线提供一个计数。
- 脉冲和方向设备将单向通道与单通道计数或带正交的多通道计数相结合。
- 参考或索引信号会产生每转一次的标记或原点位置。
- 绝对码:通常在电源循环后读取位置,有多种输出类型。
- 电气/数字输出:磁致伸缩传感器有多种电气和数字输出方式,例如:
- 串行同步接口(SSI)是绝对测量设备的通用标准,常见的串行输出包括RS232、RS422和RS485。
- 磁致伸缩传感器的并行输出包括通用接口总线(GPIB),该标准也被称为惠普接口总线(HPIB)和IEEE 488。
- 模拟电流输出有4 – 20 mA和0 – 2 mA。
- 模拟电压输出有0 – 10V,此外还有可通过光纤传输位置数据的传感器。
技术规格
磁致伸缩位移传感器在性能规格、尺寸和功能方面存在差异。性能规格包括:
- 测量范围:指可测量的整个行程范围,单个传感器型号可能具有可选或可配置的范围。
- 分辨率:是光学三角测量位置传感器能够检测到的最小区分单位。
- 工作温度和环境:描述传感器工作时所处的条件,环境可能会影响测量材料和测量精度。
- 波导杆尺寸:需考虑波导杆的横截面高度和宽度,以确保设备能安装到系统中。
- 密封传感器:可防止灰尘、污垢或切屑等污染物进入。
- 探针/柱塞传感器:包含一个可直接抵在被测设备表面的尖端或柱塞,通常这类探针式传感器通过弹簧或轻微气压来施加偏力。
应用领域
这些传感器非常适合需要精确测量、“无磨损”部件以及具备抗冲击和抗振动能力的应用场景。磁致伸缩传感器在食品饮料、液位测量、医疗、金属加工、纸张转换、塑料、木材和测试设备等领域具有优势。
 微信扫一扫
微信扫一扫
