

1范围
本规范适用于磁致伸缩位移传感器的校准。
2引用文献
本规范引用下列文献:
JJF 1001-1998 通用计量术语及定义
JJF 1059-1999 测量不确定度评定与表示
JJF 1094-2002 测量仪器特性评定
GB/T 7665-2005 传感器通用术语
GB/T 13606-2007 土工试验仪器 岩土工程仪器 振弦式传感器通用技术条件
GB/T 18459-2001 传感器主要静态性能指标的计算方法
使用本规范时注意使用上述引用文献的现行有效版本。
3术语
3.1线位移传感器linear displacement sensor
能感受长度尺寸变化并转换成可用输出信号的器件。
3.2灵敏度sensitivity
传感器输出量变化值与相应输入量变化值之比。
3.3线性度linearity
传感器正、反行程实际平均特性曲线相对于参比直线的最大偏差与满量程输出的百分比。
注:随参比直线的不同,有多种线性度,本规范参比直线采用最小二乘直线或最佳直线。
3.4满量程输出full scale output
在规定条件下,传感器输出的上限值和下限值之间的代数差。
4概述
线位移传感器可用来测量位移、距离、位置和应变量等长度尺寸,在工程测试中应用广泛。线位移传感器输出信号的类型多,绝大部分线位移传感器输出电信号,如不同频率的脉冲信号、电压或电流等模拟量;也有些线位移传感器已集成了信号转化功能,能直接以数字方式或其他方式输出长度尺寸。
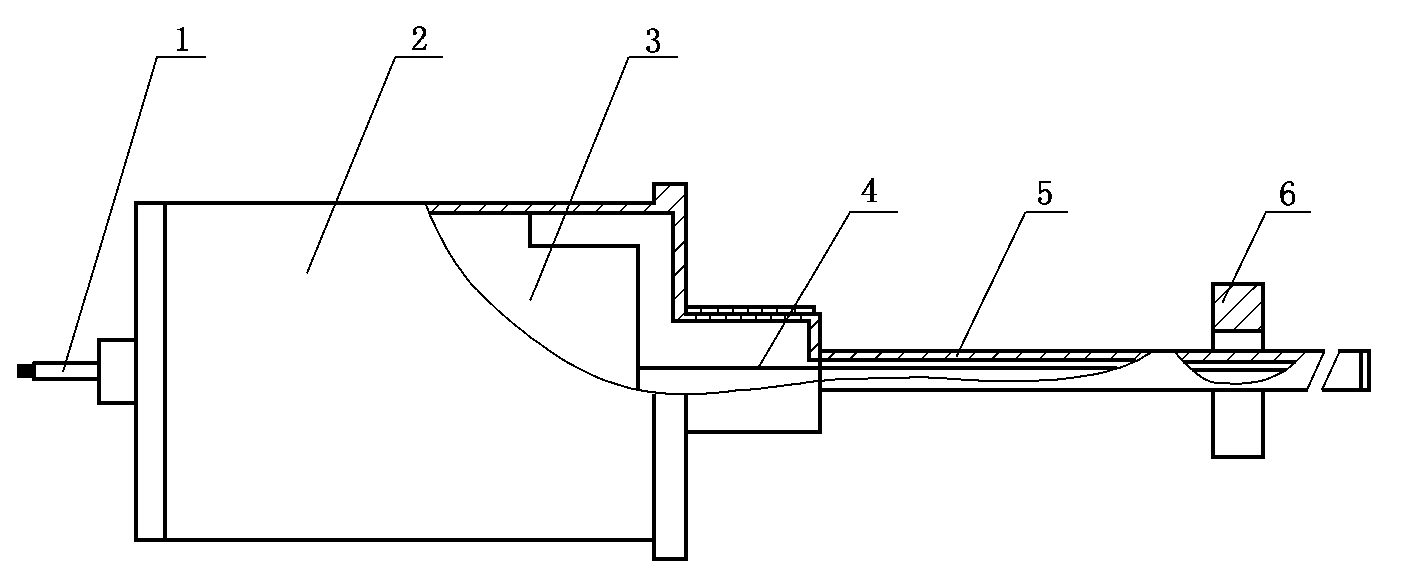
1—电缆;2—外壳;3—信号处理部件;4—波导线;5—不锈钢保护管;6—磁环
5计量特性
磁致伸缩位移传感器主要的计量特性有:灵敏度、基本误差、线性度、回程误差、重复性。
对于能直接以数字方式或其他方式输出长度尺寸的线位移传感器,可以只校准基本误差、回程误差和重复性三项计量特性。
典型磁致伸缩位移传感器计量特性见下表。
| 项目 | 技术指标 |
| 基本误差(%) | ±0.05 |
| 线性度(%) | ±0.05 |
| 回程误差(%) | 0.02 |
| 重复性(%) | 0.02 |
6校准条件
6.1环境条件
6.1.1实验室温度、相对湿度和平衡温度时间的要求见表8。表8环境条件
| 校准室内温度(℃) | 室温变化(℃/h) | 相对湿度(%) | 被校准仪器在室内平衡温度的时间(h) |
| 20±2 | 1 | ≤75 | ≥4 |
6.1.2电源电压的波动不应超过额定值的±10%,实验室内应避开强交变电磁场或近距离的交变磁场(如电机、电焊机等)的干扰。
6.2校准用主要设备
对不同型式的线位移传感器,校准用的主要设备见表9。表9校准线位移传感器的主要设备
| 线位移传感器型式 | 采用设备 |
| 磁致伸缩式位移传感器 | (1)激光干涉仪:MPE:±(0.03μm+1.5×10-6L)(2)数字多用表:MPE:DCV±0.004%~±0.1% |
7校准项目和校准方法
检查被校准的线位移传感器,并对被校准的传感器按说明书进行标定,确定没有影响计量特性的因素后再进行校准。
7.1校准项目
根据线位移传感器实际应用时的输出方式,选择需要校准的计量特性项目。
7.2校准方法
根据表9选择不同的长度标准器为线位移传感器提供位移输入,采用相应的二次仪表读取线位移传感器的输出量(电压、电流)。
传感器的安装尽量满足阿贝原则。调整传感器的输出范围,在其输出范围内大致均匀分布取 11个校准点(包括上、下限),按顺序分别读出长度标准器给出的位移值L和各校准点上的输出值y;[对于振弦(应变)式位移传感器,L;为显示装置显示的位移值与传感器基本长度的比值]。以正、反两个行程为一个测量循环,共测量三个循环。根据三个循环的测量结果,采用最小二乘法计算参比直线方程,见式(1)。
Yi=Y0+KLi(1)
斜率 K 及截距 Y。的计算公式如下:
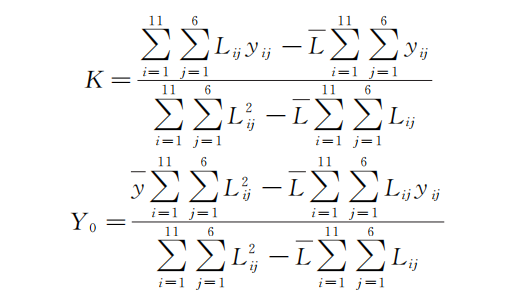
式中:Yi—被校准线位移传感器在第i个校准点处输出量的拟合输出值;
Y0—参比直线的截距;
K—参比直线的斜率;
yij—被校准线位移传感器在第j次行程中第i个校准点的输出值;
y—被校准线位移传感器各校准点输出值的平均;
Lij—被校准线位移传感器在第j次行程中第i个校准点的输入值;
L—被校准线位移传感器各校准点输入位移值的平均;
i—第i个校准点,i=1,2,…,10,11,下同(另有说明除外);
j—第j次测量行程次序数,j=1,2,…,5,6,下同。
7.2.1 灵敏度
取式(2)中最小二乘法参比直线的斜率作为灵敏度测量结果
7.2.2 基本误差
根据参比直线方程式(1)求出被校准线传感器在第i个校准点处的拟合输出值Yi后,按式(4)计算传感器在第j次行程中第i个校准点的误差δij,取三个循环正、反行程中绝对值最大的作为第i个校准点上的误差值,取各i点中绝对值最大的作为基本误差测量结果。
δij=(yij-yi)/YFS*100%
式中:YFS—满量程输出,由式(5)确定,下同。
YFS=YM-YN(5)
式中:YM—位移至上限值时三个循环正、反行程输出量的平均值;YN—位移至下限值时三个循环正、反行程输出量的平均值。
7.2.3线性度
按参比直线方程式(1)求出传感器在第i个校准点处的拟合输出值Yi后,由式(6)计算各校准点的偏差li,取各i点中绝对值最大的作为线性度测量结果。
 微信扫一扫
微信扫一扫
