

自1990年数字水准仪的问世以来,水准测量作业的效率得到了极大地提高。自此不断有新型数字静力水准仪问世,例如采用电荷耦合固体摄像器件(CCD)作为敏感元件的光电型仪器以及超声波静力水准仪和激光测距静力水准仪。但磁致伸缩液位传感器在形变仪器上的应用尚未见报道。
磁致伸缩位移传感器是利用磁致伸缩效应研制的传感器,可以实现非接触、绝对式测量,具有大量程、高精度的特点,同时由于采用非接触式元件,减少了磨损,故具有较高的可靠性。据NASA的测定,磁致伸缩液位传感器平均无故障时间(MTBF)为23年。同时,由于其安装方便、调试快捷、测量精度高,比传统的压力、电容、差动变压式以及CCD式等测量系统具有更高的应用和经济价值。
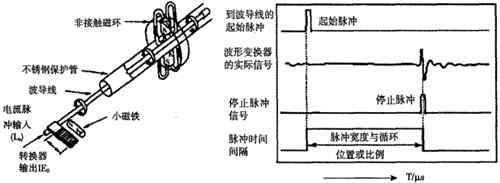
磁致伸缩液位传感器由三部分组成:探测杆,电路单元和浮子组成。测量时,电路单元产生电流脉冲,脉冲沿着探测杆传输,并产生一个环形磁场。磁致旋转波的传播速度为
V=√G/p(1)
式中:G为探测杆的剪切弹性模量;p为波导管密度;均为恒定值。
在探测杆外配有浮子,浮子随液位的变化而上 下移动。浮子内部有一组永磁铁,会同时产生一个磁场,当电流磁场与浮子磁场相遇时,产生一个“返回”脉冲,将“返回”脉冲与电流脉冲的时间差转换成脉冲信号,就可计算出浮子的实际位置,测得液位。
2、系统总体设计
系统主要由主机系统、水管系统、信号采集系统等模块组成。系统结构如下所示。
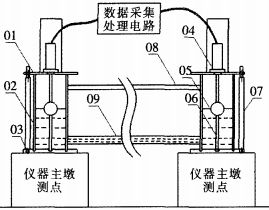
1-侧头上板;2-钵体;3-侧头底板;4-传感器电路单元;5-浮子;6-探测杆;7-测头连接柱;8-空气连接管;9-蒸馏水连接管
系统是根据连通容器中液体表面自然保持水平的特性进行工作的,当仪器主体所在处(检测点)高度变化时,仪器主体钵中的液面将相对于钵体发生相对升降变化,测量出这些变化量就可以计算出每个监测点相对于某一基点的高差。设Y,Y₁,Y₂,…,Yn,为基准点及测点1到n的液面变化量,h₁,hz,…,hn。每个测点相对于基准点的高差为
系统标定时通过移动标定装置,通过改变液体体积,实现人为改变液面升降的目的,和电路信号连接起来,从而求得液面改变单位高度时,电信号数值的变化。
3、信号采集及处理
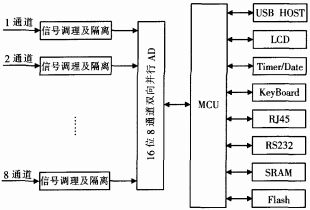
系统选用C8051F020作为中央处理器,主频达25M,片内自带64K可编程序存储器,不需外部程序存储器的扩展。信号调理模块主要是将来自于传感器的信号进行处理,滤除干扰,并转换到A/D芯片允许输入范围,电路设计均选用精密元件。AD采用Maxim的16位8通道并行转换芯片Max1302.采样频率达115k/s。系统扩展了容量为8Mb的Flash芯片AT45DB081.为大量检测数据的存储提供了保障。同时为了系统使用方便,硬件设计时加入4×4键盘和128×64液晶,并支持检测数据的U盘读取(CH375USBHOST)、网线及串口传输。系统满足中国地震局“十五”期间地震前兆仪器的网络化要求。
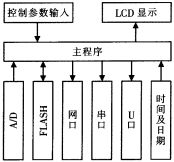
系统软件采用模块化设计,各模块功能相对独立,程序结构清晰,调试方便,代码可重用度高,主程序只需对各模块进行调用,即可实现系统功能。系统软件框图如下图。
4、误差来源及处理
1)为避免磁致伸缩位移传感器探测杆不垂直引起的误差,采用气泡法调直。
2)为防止钵体水分蒸发流失及钵体管壁湿润导致液面下降,将整个钵体设计为密封结构,各个钵体在上方用空气管连接,保证各钵体气压相同,同时将钵体直径设计为≥18cm,可将液体分子和固体分子间相互作用引发的湿润现象影响减至最低。
3)为防止探测杆及钵体的温度形变而引起的误差,采用线胀相同的材料设计及探测杆和钵体,本系统均采用硬铝。
其他误差,如液体漏失误差等可以忽略。
5、结语
本系统受中国地震局地震研究所基金资助,并满足JJG425-2003《水准仪》国家计量检定规程。系统采用超宇测控自动化所设计的CY3068磁致伸缩位移传感器。经测试,系统稳定性好、量程大且精度较高,所有性能参数均满足工程实际的需要。
 微信扫一扫
微信扫一扫
