

位移是工农业生产及贸易结算中应用非常广泛的一个重要参数。为了满足这一测量要求,提出了很多测量方法,利用磁致伸缩原理进行位移测量便是其中一种。这种方法具有宽量程、高精度、多位移等特点可以用于计量精度要求较高的场合。
为了更好地解决磁致伸缩传统测试仪器中误差过大、体积过大、操作过复杂及价格过高等问题,本设计利用单片机STM32F103与时间芯片MS1022完成高精度时间测量,保证了磁致伸缩传感器的测量精度。本设计的研发样机已经于2021年完成,目前处于量产阶段。
1、磁致伸缩位移传感器工作原理
铁磁晶体在外磁场中被磁化时,其尺寸长度及体积大小均发生变化,这一现象是由科学家JamesPrescott于1842年发现的,称为磁致伸缩现象。根据铁磁材料在磁场中的几何尺寸变化的形式不同,磁致伸缩效应可分为纵向效应、横向效应、扭转效应和体积效应,除此之外,磁致伸缩还具有逆效应,即Villari效应。纵向或横向磁致伸缩又称为线磁致伸缩,表现为铁磁体在磁化过程中具有线度的伸长或缩短。
磁致伸缩位移传感器的工作原理是基于磁致伸缩效应。传感器的保护套管内部有一根波导丝。借助单片机及外围电路,沿波导丝发射激励脉冲,从而在波导丝周围产生一个环形磁场。浮子内部有一组永久磁铁,其磁场使波导丝沿轴向磁化。两个磁场叠加处会产生一个扭转脉冲,它沿波导丝传达到传感器顶端,通过检测发射脉冲与回波的时间差,即可计算出位移。
1.1、硬件总体设计
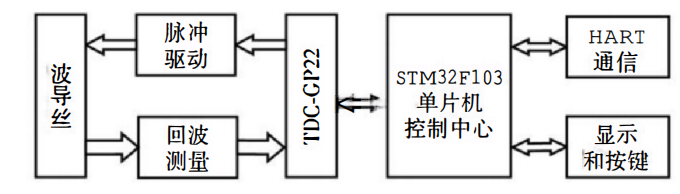
系统硬件框图如图1所示。本设计以STM32-F103RBT6单片机为控制核心,使用MS1022芯片测量发射脉冲与回波的时间差。MS1022芯片中Fire管脚控制脉冲驱动电路发射激励脉冲。波导丝在激励脉冲和磁性浮子相互作用下产生一个扭应力波,被回波测量电路检测到,然后送回到MS1022芯片中Stop管脚。经过MS1022芯片计算出时间差,再由单片机计算出对应的位移高度。同时,根据位移高度输出4~20mA电流信号。利用液晶屏和按键可以对仪表的参数进行修改和调整。
1.2、TDC时间测量电路
MS1022芯片的时间测量单元以时间数字转换器(TDC)为核心,其最大的测量精度完全取决于内部信号通过逻辑门传播时间。
MS1022最主要的改进在于新增了第一波检测功能,测量第一个回波脉冲的相对宽度将会给用户一个对于接收信号强度的提示,通过这个提示信息可以用于后续检测电路中增益倍数的控制,保证回波信号强度。TDC时间测量电路如图2所示。

1.3、高压脉冲驱动电路
通过测试而得,波导丝产生的扭转形变越大,回波信号的幅值就越大。因此,需要给波导丝一个高压脉冲。
MS1022芯片自带的高频脉冲信号发生器系统可产生脉冲信号,但该信号的电压只有3.3V,驱动能力无法满足本设计的需求。为此设计了高压脉冲驱动电路,如图3所示。
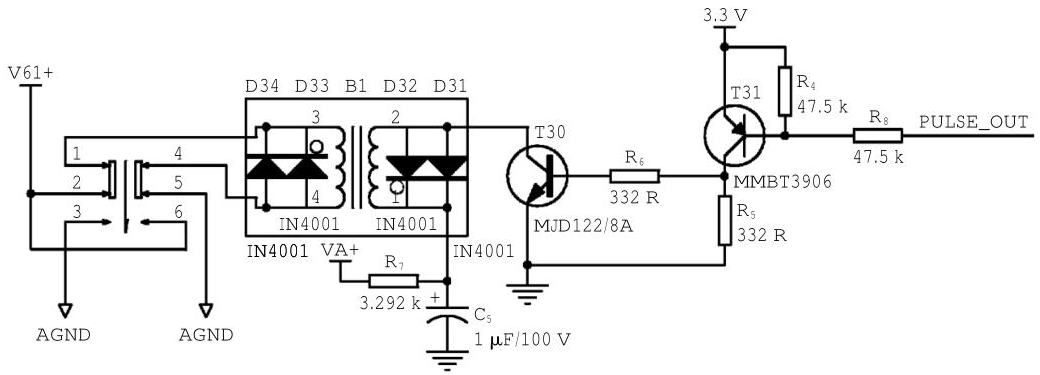
MS1022输出的PLUSE_OUT信号经过三极管驱动后输入到变压器B1中,形成高压激励信号,峰峰值可以达到50V,满足本系统工作要求。
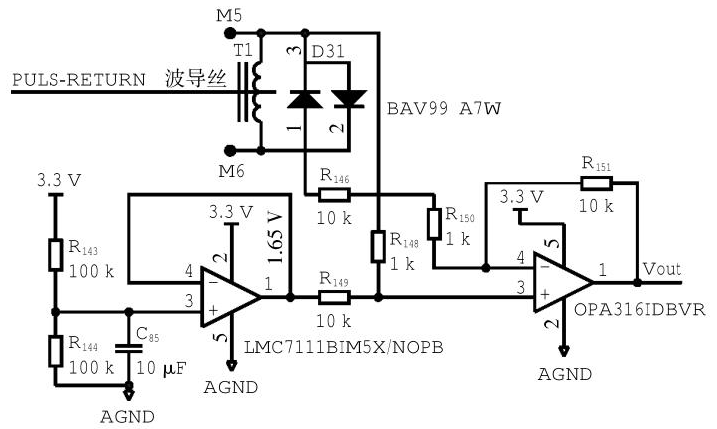
1.4、回波检测电路
由于回波信号幅值仅仅几个毫伏,并且夹杂着大量杂波信号,需要在进入MS1022芯片前进行处理。因此设计回波检测电路对信号进行滤波和放大,以供MS1022芯片接收。如图4所示,运算放大器LMC7111BIM5X/NOPB的作用是抬高电路静态工作点,避免地线上的杂波干扰,运算放大器OPA316IDBVR的作用将信号放大。Vout信号进入到MS1022芯片,用来计算回波时刻。
2、系统软件设计
系统开始工作时,初始化过程中对MS1022芯片进行配置,MS1022接收到测量指令后发出脉冲信号,经过高压脉冲驱动电路形成高压激励脉冲,驱动磁致伸缩传感器工作。回波检测电路收到回波信号后经过滤波和放大输入到MS1022芯片。MS1022芯片计算出发射和接收之间的时间差传输给单品机,单片机STM32F103RBT6进行数据处理后计算位移高度,并输出与位移对应的电流值。系统流程图如图5所示。
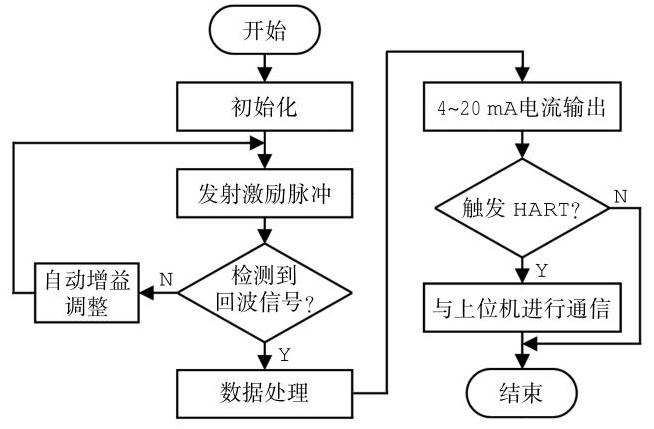
当上位机有HART通信请求时,单片机会启动通信处理子程序,完成数据通信。
当超过预定时间仍然无法检测到回波信号时,单片机会启动自动增益调整子程序,调整回波检测电路中的放大倍数,提高回波信号幅值。
3、系统测试
3.1、测试结果
表1测量数据
Tab.1Measurementdata
| 测量距离/m | 实测距离/m | 显示距离/m | 电流值/mA | 误差/m |
| 盲区最小值 | 0.2875 | 0.2873 5.6309 | 4.47 12.99 | 0.0002 0.0003 |
| 测试点1 | 5.6306 | 5.6308 5.6309 10.3255 | 12.99 12.99 20.00 | 0.0002 0.0003 0.0004 |
| 测试点2 | 10.3251 | 10.3254 10.3255 | 20.00 20.00 | 0.003 0.0004 |
3.2、误差分析
在系统中,外界环境、硬件电路的性能、传播过程中的延时、软件的算法都会对测量产生影响。方波信号从MS1022的Fire引脚产生后,需要经过高压脉冲驱动电路及回波检测电路才能回到计时芯片,得到的时间差略大于真实值,这部分误差仅能通过数据对比尽可能减小,无法彻底消除。
4、结语
本文利用高性价比、低功耗的STM32作为处理器,结合MS1022数字转换芯片测量飞行时间以测量行程位移。经过实验检测,本设计具有较高精度和稳定性,具有较高的实用价值。
 微信扫一扫
微信扫一扫
